Манипулятор построен на основе антропоморфных захватов с копирующей системой управления, что дает возможность бережной сортировки нестандартных или хрупких РАО, а также использование общепромышленного ручного инструмента для демонтажа оборудования в высоких радиационных полях. Использование гидромеханической схемы позволяет выполнять работы также и в жидкой среде. Для вывода из эксплуатации вырабатывающих свой ресурс энергоблоков российских АЭС «Росатом» планирует разработать робототехнические устройства. Роботы обезопасят человека во время будущего демонтажа и дезактивации энергоблоков. «Это очень хорошее дело. Мы обязаны выводить из эксплуатации старые блоки. Большинство оборудования там радиоактивное, но при этом в основном низкоактивное, хотя есть и высокоактивное. До сих пор демонтаж высокоактивного оборудования был сложнейшей задачей, где иногда пребывание персонала расписывалось по секундам. Если использовать робототехнику, то оператор будет сидеть в защищенном месте и управлять роботом, который будет разделывать высокоактивное оборудование, укладывать в защитные контейнеры, и отправлять их на утилизацию. Дело дорогое, но вне всякого сомнения того стоит», - комментирует «Экономике сегодня» директор РЭС-центра Михаил Рылов. Эксперт отмечает, что по большому счету управляемые машины в мире уже используют. «Мы их использовали и сами для ликвидации аварии на Чернобыльской станции. И не только свои, но и импортные. Другое дело, что импортные отказывали при тех потоках излучения, которые там были, но по факту управляемые машины существовали и в 1986 году.












 Манипулятор построен на основе антропоморфных захватов с копирующей системой управления, что дает возможность бережной сортировки нестандартных или хрупких РАО, а также использование общепромышленного ручного инструмента для демонтажа оборудования в высоких радиационных полях.
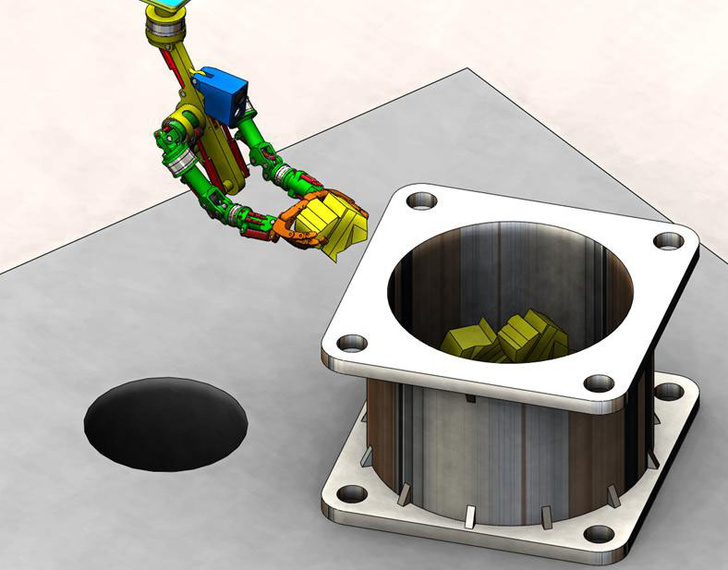
Манипулятор построен на основе антропоморфных захватов с копирующей системой управления, что дает возможность бережной сортировки нестандартных или хрупких РАО, а также использование общепромышленного ручного инструмента для демонтажа оборудования в высоких радиационных полях.